部门: 智能科学与工程学院
学科: 控制科学与工程
职务:
职称: 教授
指导资格: 博士生导师 硕士生导师
电话: 82518714
传真: 82518741
邮箱: xubocarter@sina.com
邮编: 150001
地址: 哈尔滨工程大学61号楼
[1] 2011.12–2015.08,哈尔滨工程大学, 控制理论与控制工程, 博士后
[2] 2007.09–2011.03,哈尔滨工程大学, 精密仪器及机械, 工学博士
[3] 2004.09–2007.03,哈尔滨工程大学, 控制理论与控制工程, 工学硕士
[4] 2002.11–2003.11,东京电气通信大学,电气通信工程, 工学学士
[5] 2000.09–2004.07,哈尔滨工程大学, 电气工程及其自动化, 工学学士
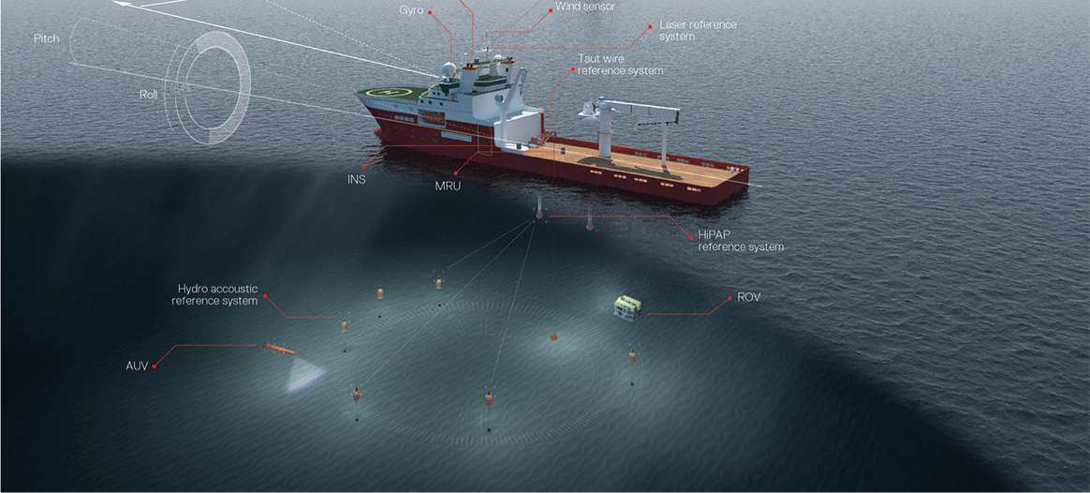
背景与意义:惯性导航系统依靠运载体自身设备独立自主地进行导航,不依赖外部信息,具有隐蔽性好、工作不受气象条件和人为干扰影响的优点在导航技术中占有非常重要的地位。同时惯性导航系统以其具有丰富的导航参数的优势成为各类组合导航系统的基础,例如惯性/多普勒计程仪、惯性/全球卫星定位系统等。惯性及惯性基组合导航系统己经逐步推广到航天、航空、航海、石油开发、大地测量、海洋调查、地质钻控、机器人技术和铁路等领域,随着新型惯性敏感器件的出现,其在汽车工业、医疗电子设备中都得到了应用。在国民经济各个领域中也日益显示出它的巨大作用。

知识技术体系:惯性导航、组合导航、多传感器信息融合、Matlab/C++程序设计等。
能力培养:理论分析能力、算法设计能力、硬件电路设计能力、软件编程能力。
培养特色与优势:校企合作,密切结合海军装备,理论算法、仿真分析与实际验证相结合。
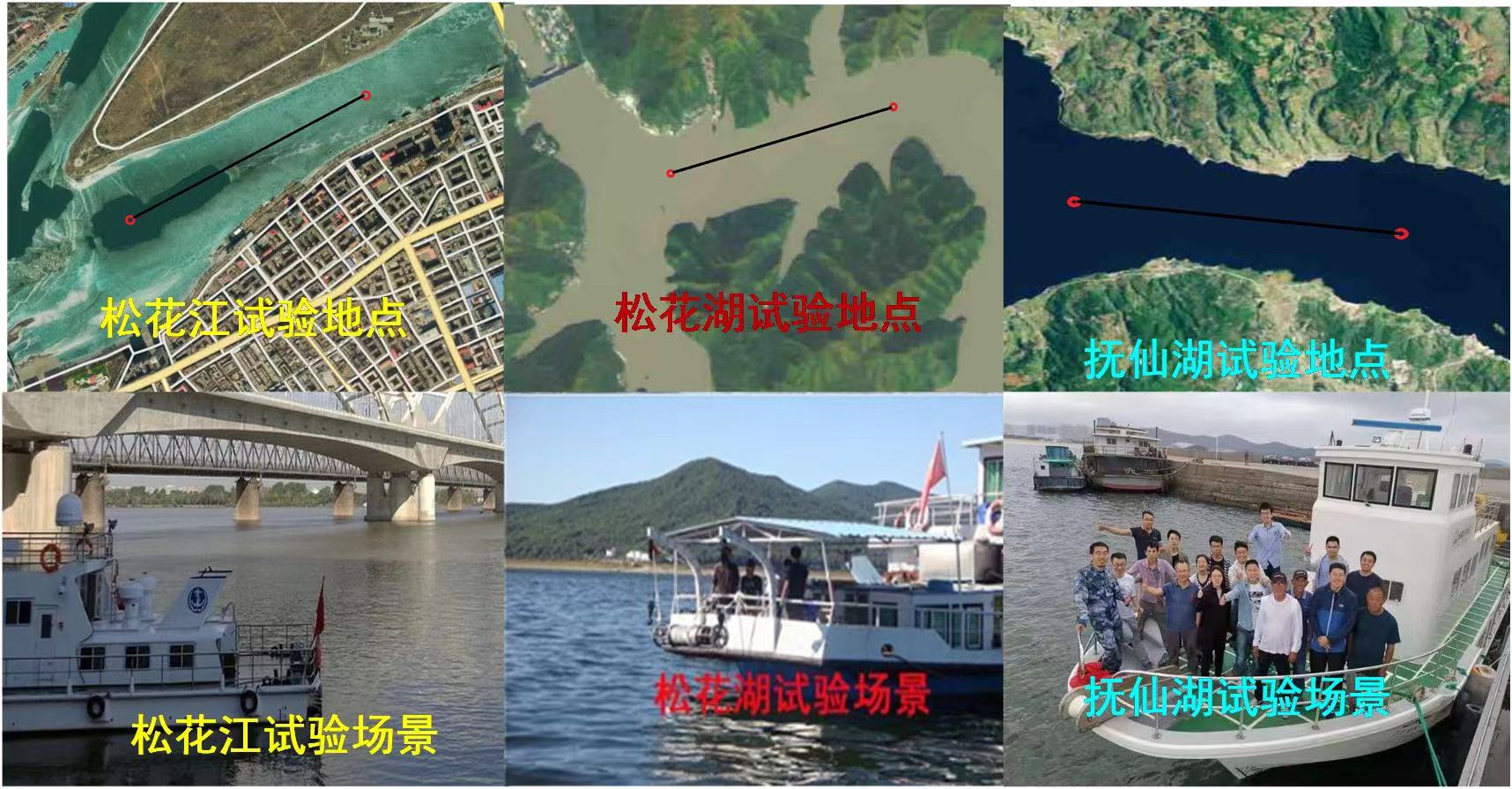
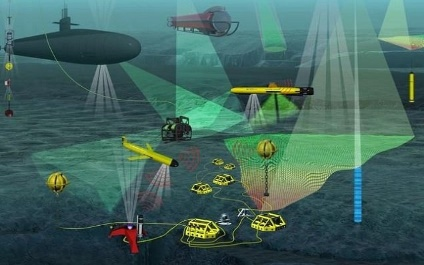
背景与意义:水下机器人作为人类探索海洋、捍卫国防安全的重要运载平台,但随着人类海洋勘探活动的日益深入,单体机器人在面对大尺度、高效性的任务需求时显得身单力薄,于是研究人员将目光投入到多机器人组成的协作系统。而高精度的导航定位与编队控制是多机器人协作完成任务的重要技术保障。高性能的控制器设计可以使机器人编队按照要求的编队形式协同执行任务,在民用和军用领域中都具有丰富的发展前景。协同导航作为最具有研究前景的水下导航方式之一,具有全海域航行、成本低、精度高等优点,适用于水下多机器人编队协作系统。

知识体系与技术体系:惯性导航、组合导航、多传感器信息融合、电磁/水声通信、故障诊断、人工神经网络算法、协同控制、仿生优化算法设计、Matlab仿真程序设计、C++程序设计等。
能力培养:系统方案设计能力、理论分析能力、算法研究能力、软件编程能力。
培养特色与优势:专业技能多元化发展、密切结合国家项目、理论分析与试验验证相结合、实验室具备多年丰富的研究基础。
背景与意义:自动驾驶技术是依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆的一种智能化技术,主要由环境感知、行为决策与车辆控制等系统组成,涉及技术有决策算法、路径规划、多传感器融合、机器视觉、自然语言处理等,是一项多种学科、技术交叉的前沿技术。现阶段研究自动驾驶的最重要的意义在于解决交通运输的安全和效率问题。SLAM即同步定位与地图构建技术,主要应用于机器人、无人机、自动驾驶汽车、增强现实、三维重建等,现阶段的SLAM技术特别是视觉SLAM方向还不完善,在视觉-惯性SLAM,语义SLAM等新兴方向仍存在大量挑战。


知识技术体系:多传感器信息融合、惯性导航技术,计算机视觉、机器学习、SLAM等。
能力培养:理论分析能力、算法设计能力、软件编程能力。
培养特色及优势:校企合作,理论算法、仿真分析、实验验证相结合。
背景与意义:目标识别和定位是计算机视觉领域研究的主要问题,图像分割、目标跟踪、目标行为分析等都是以图像中的目标检测为基础的,该技术广泛应用于机器人导航、智能视频监控、工业检测等领域。随着深度学习技术的发展,目标检测算法取得了巨大突破。然而在某些复杂场景下或者是含有小目标的情况下,现有主流的目标检测算法在实时性以及精度上还存在一些局限性,如何提高检测效率、保证检测精度、实现算法轻量化是现阶段的热点问题。

知识技术体系:神经网络搭建、目标检测与识别、深度学习框架应用、python编程等。
能力培养:理论分析能力、算法设计能力、算法优化改进能力、软件编程能力。
培养特色与优势:校企合作,结合海洋领域,理论算法。
背景与意义:深度学习是人工智能从概念提出到走向繁荣得以实现的主流技术。成为移动机器人、人脸识别、物体检测、自动驾驶、智能家居等应用不可或缺的方法,并且基于深度学习的方法在准确率上已经接近甚至超过人类水平。研究深度学习的智能算法对提高智能感知领域目标的检测与识别精度有着重要意义。将智能算法与导航相结合,紧跟研究前沿。

知识技术体系:神经网络、数字图像处理、目标识别与跟踪、图像分割、视觉导航、自动驾驶、python程序设计等。
能力培养:理论分析能力、算法设计能力、软件编程能力。
培养特色与优势:校企合作,理论算法、仿真分析与实验验证相结合,紧跟国家对人工智能的发展战略要求,对接企业需求。为将来就业以及深造奠定基础。
依托“先进舰船导航与测绘技术”兴海学术团队,立足于惯性系统算法/惯性基组合导航、多机器人协同导航与编队控制、视觉惯性SLAM、目标检测与智能识别等科研攻关方向,作为项目负责人或核心技术骨干,主持/承担国家自然科学基金、工信部高技术船舶等项目10余项;目前,主持/参加国家自然科学基金面上项目、国际合作项目、型号研制、黑龙江省自然科学基金、中央高校基金、等各类项目10项。科研成果获黑龙江省自然科学二等奖1项、科技技术进步二等奖1项、中国专利奖1项,并出版著作6部,发表学术论文50余篇,授权国家发明专利22项。
(1)多次赴美国、日本、德国等地参加高水平国际学术会议,并宣讲论文。
(2)已与中科院自动化所在机器人智能系统方向建立长期合作,已联合培养1名博士;
(3)已与中船七院在航行器导航控制理论方面建立长期合作,已联合培养2名硕士;
团队每年可招收博士后1人、博士研究生2人、硕士研究生3-8名,其中保送生可以招收4名
招生专业:控制科学与工程、人工智能、仪器科学与技术、电子信息
招生类型:欢迎数学好、编程能力强、动手能力强的同学加入


| Introduction: |
|
||
| Education Background : | |||
| Professional Experience : | |||
| Qualifications and Skills : | |||
| Academic Positions and Titles : | |||
| Research Fields: |
|
||
| Projects: |
|
||
| Honors and Awards、Academic Activities: |
|
||
| Admission: | |||
| Courses: | |||
| Practical Teaching: |
|
||
| Books: | |
| Journal and Conferences: | |
| Patents: | |
| Software Copyrights: | " |
 | 2017级博士生:李盛新 |
 | Asghar A. Razzaqi: |
 | 2017级博士生:王连钊 |
 | 2018级博士生:刘海明 |
 | 2019级博士生:王潇雨 |
 | 2020级博士生:郭瑜 |
 | 2020级博士生:王朝阳 |
 | 2021级博士生:王权达 |
 | 2021级博士研究生:费亚林 费亚林,女,汉族,1997年12月出生,共青团员,哈尔滨工程大学智能科学与工程学院2020级人工智能专业硕士研究生,于2021年转为博士研究生。大学期间曾获得校一等奖学金二次,二等奖学金一次,全国大学生数学建模竞赛省级奖一次。研一期间获得学业奖学金二等奖并参与英文译著一本。主要研究方向为信息融合、故障诊断和协同导航。 |
 | 2019级硕士生:陈崇 |
 | 2019级硕士生:余志强 |
 | 2019级硕士生:矫名羽 |
| 2019级硕士生:杨泽琼 |
 | 2020级硕士生:赵晓伟 |
 | 2020级硕士生:国运鹏 |
 | 2021级硕士生:胡俊苗 |
 | 2021级硕士生:李汉领 |
 | 2015级硕士生:郝芮 |
 | 2016级硕士生:刘德政 |
| 2016级硕士生:王光园 |
 | 2017级硕士生:李珊珊 |
| 2020级硕士生:张大龙 |
 | 2016级硕士生:段腾辉 |
 | 2018级硕士生:张奂 |
实验室文化:学术科研氛围融洽、活动丰富多彩
科研成果的产出离不开整洁的科研环境,离不开浓厚的科研氛围,离不开有温度的科研文化。
1.我们正在创造和改善我们的科研环境。

2.致力打造浓厚科研学术氛围
3.实验室活动
除了在实验室忙碌的学习生活、工作生活,我们也常在业余时间组织各类娱乐、温馨的活动,一边放松身心,一边也通过活动增加实验室的凝聚力。


实验室特色1:以基础和应用基础研究为根本
瞄准导航技术国际前沿研究方向,开展前瞻性和创新性基础和应用研究基础。

实验室特色2:与高科技企业院所合作密切,直击科技前沿
立足导航,服务国防,以理论研究和关键技术为突破口,为国家安全和重大需求提供技术支撑。与中科院自动化所、中船七院、哈船导航、青岛青软公司等高科技院所合作密切,且可提供实习就业机会。


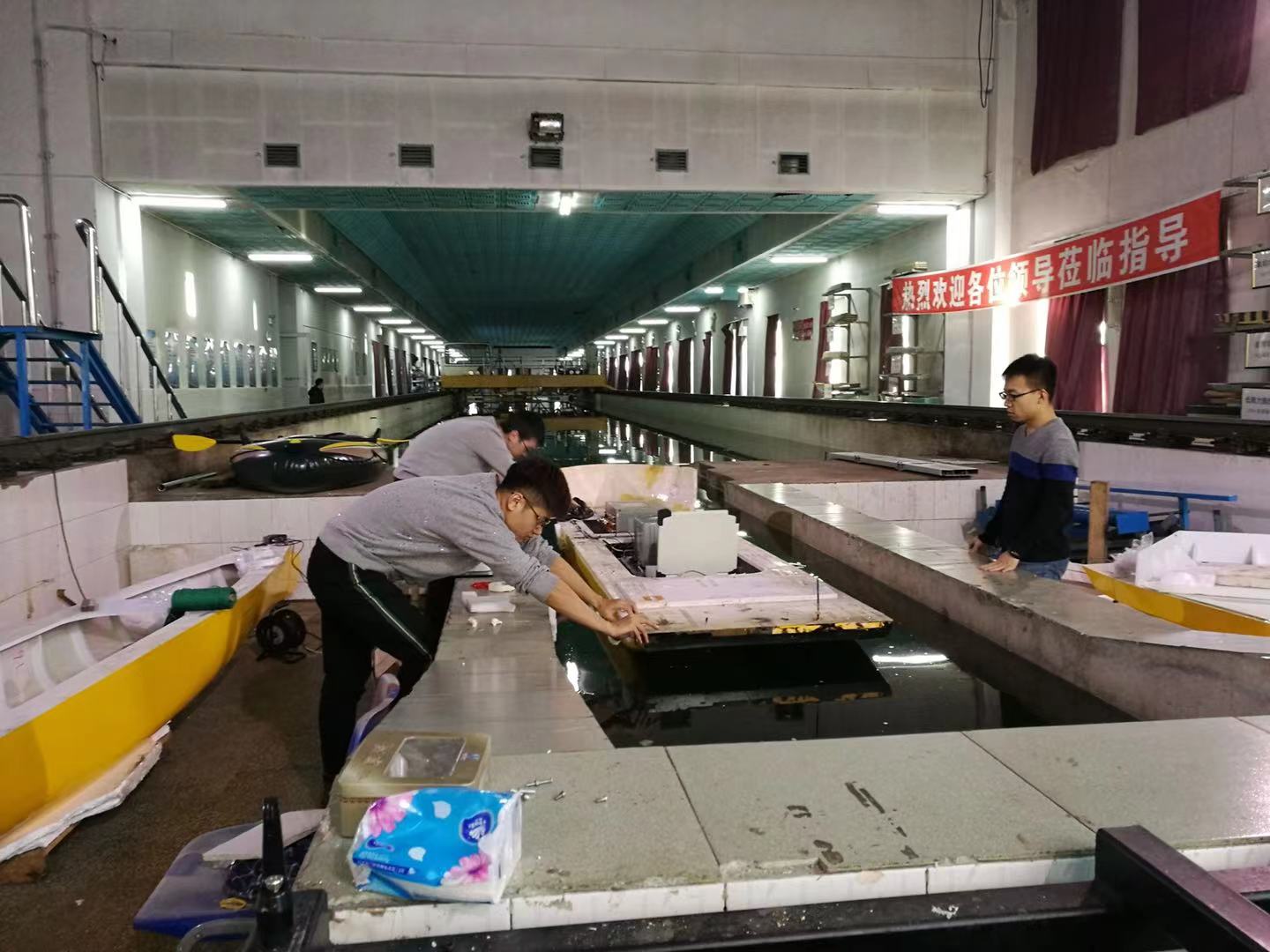
实验室特色3:科研试验机会颇多、积累丰富的实践经验
立足导航技术的发展前沿,面向国民经济发展与科技发展的战略目标和重大需求,凸显国防特色和军民融合发展理念,通过多学科交叉,积极开展高水平学术交流与合作,提供高水平科研实验平台,如无锡太湖、吉林松花湖、杭州千岛湖、昆明抚仙湖、扬州高邮湖。威海、青岛、三亚海上试验。